
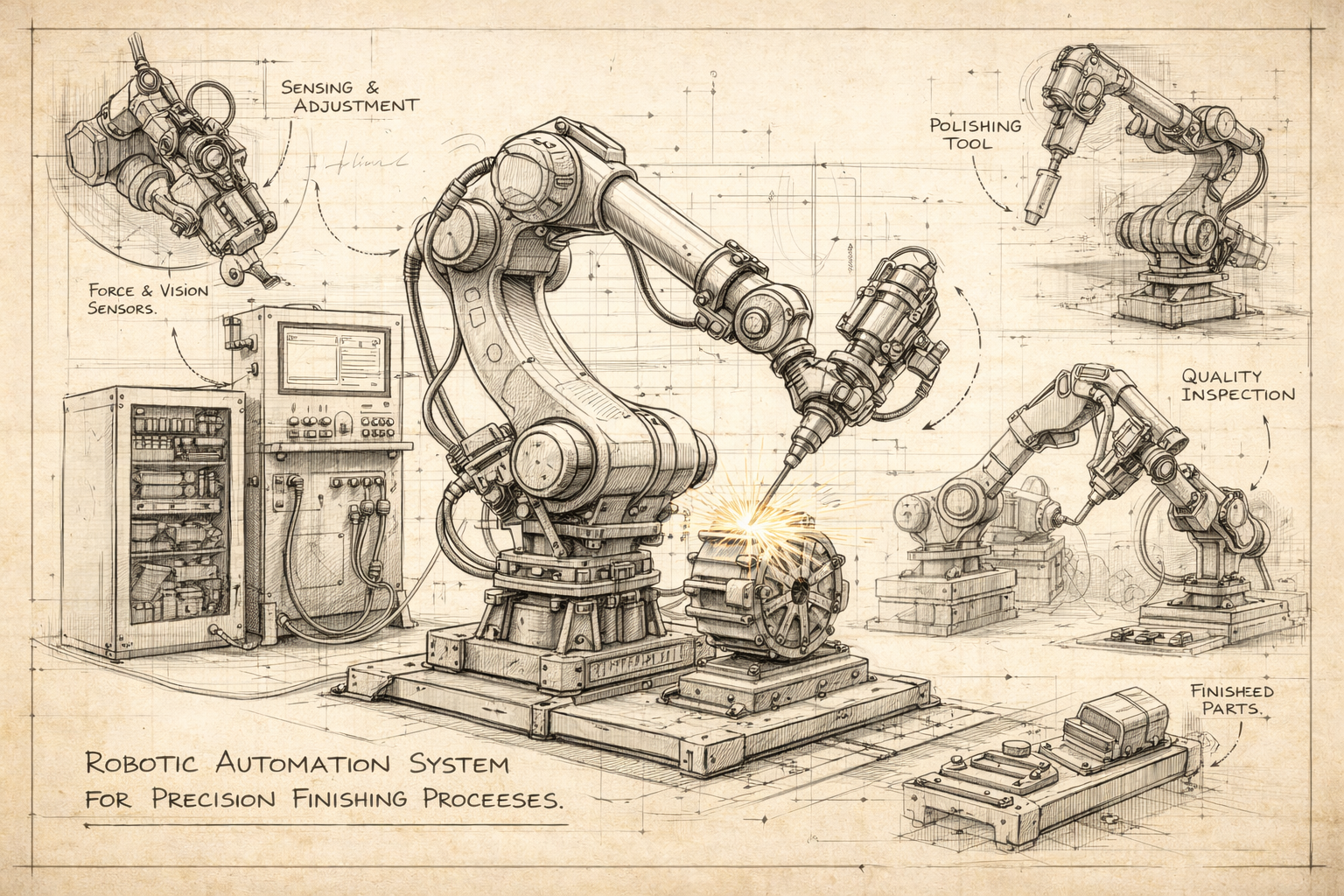
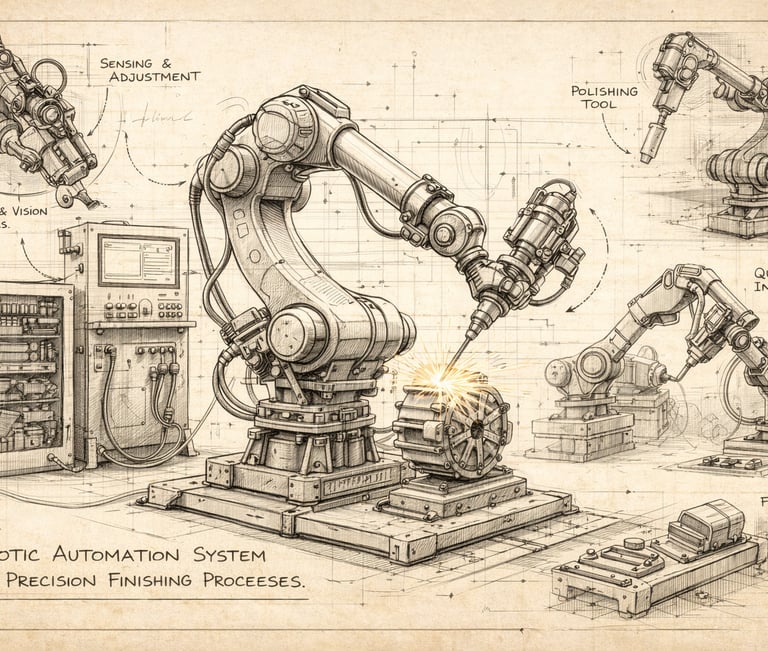
Sistema de Automatización Robótica para Procesos de Acabado de Precisión
Precisión micrométrica y eficiencia industrial Desarrollamos un sistema adaptable basado en un brazo robótico de 6 ejes diseñado específicamente para automatizar procesos de pulido y acabado superficial de alta complejidad. Al integrarse con maquinaria convencional, esta solución elimina la variabilidad humana, garantiza la uniformidad en sectores críticos como el aeroespacial y el médico, y maximiza el rendimiento de los activos industriales existentes.
Análisis de la Problemática
La industria manufacturera de alta precisión, particularmente en óptica, componentes aeroespaciales y moldes, enfrenta un cuello de botella en las etapas de acabado superficial (pulido, lapeado). Estos procesos son intensivos en mano de obra especializada, sujetos a variabilidad inherente y fatiga del operador, lo que compromete la consistencia de la calidad, incrementa los tiempos de ciclo y genera un alto costo por reproceso. La automatización rígida tradicional es costosa y poco flexible para lotes pequeños o medianos.
Solución Propuesta
Desarrollamos un sistema de automatización adaptable basado en un brazo robótico de 6 ejes, integrado con sensores de fuerza y visión artificial, programado específicamente para tareas de pulido. El sistema no reemplaza la línea de producción existente, sino que se acopla a máquinas-herramienta convencionales (pulidoras, lapidadoras) para convertirlas en celdas de manufactura autónoma. La programación por demostración ("lead-through programming") permite capturar la trayectoria experta de un técnico y replicarla con absoluta fidelidad.
Estado y Próximas Etapas
El proyecto se halla en fase de diseño detallado e ingeniería de integración. Se están definiendo los requisitos mecánicos de acoplamiento y seleccionando los componentes de sensorización. Se busca colaboración con una empresa manufacturera para definir un caso de prueba piloto con una pieza y proceso específicos